Velocidades características
Na aviação, velocidades características ou velocidades-V são termos padrões usados para definir velocidades em relação ao ar importantes ou úteis para a operação de todas as aeronaves.[1] Essas velocidades derivam de dados obtidos por projetistas e fabricantes de aeronaves durante ensaios de voo para os testes de certificação de tipo das aeronaves. Usá-las é considerada uma boa prática para maximizar a segurança aérea, o desempenho da aeronave, ou ambos.[2]

As reais velocidades representadas por esses designadores são específicas para um modelo ou aeronave específico. Elas são expressadas pela velocidade indicada da aeronave (e não pela velocidade de solo, por exemplo), para que os pilotos possam utilizá-las diretamente, sem precisar aplicar fatores de correção, já que os instrumentos da aeronave também mostram a velocidade indicada.
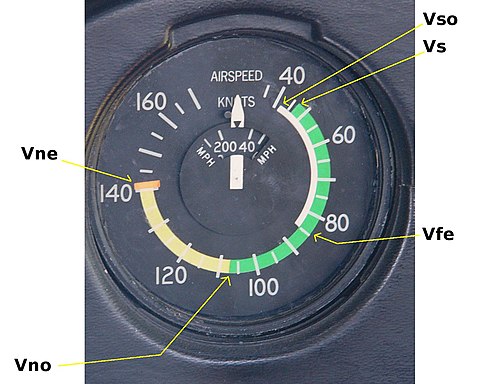
Nas aeronaves de aviação geral, as velocidades em relação ao ar mais comumente usadas e mais críticas são mostradas como arcos e linhas codificados por cor, localizados no velocímetro da aeronave. O final dos arcos verde e branco são a velocidade de estol com os flaps retraídos, e com os flaps totalmente estendidos, respectivamente. Essas são as velocidades de estol para a aeronave em seu peso máximo.[3][4] O arco amarelo é a faixa na qual a aeronave pode ser operada em ar suave, e apenas com cuidado para evitar movimentos de controle abruptos, e a linha vermelha é a VNE, velocidade a nunca ser excedida.
A exibição correta das velocidades-V é um requerimento de aeronavegabilidade para aeronaves certificadas para tipo na maioria dos países.[5][6]
Regulações
editarAs velocidades características mais comuns são normalmente definidas pelas regulações aeronáuticas de cada país. Nos Estados Unidos, essas são definidas no título 14 do Código de Regulações Federais dos Estados Unidos, conhecido como as Regulações de Aviação Federal (FARs).[7] No Canadá, o corpo regulatório, Transport Canada, define 26 velocidades-V comumente usadas em seu Manual de Informações Aeronáuticas.[8] As definições de velocidades-V nas FAR 23, 25 e equivalentes são para o projeto e certificação de aviões, não para seu uso operacional. As descrições abaixo são para uso por pilotos.
Velocidades-V regulamentares
editarEssas velocidades-V são definidas por regulações. Elas são tipicamente definidas com restrições como peso, configuração, ou fases de voo; algumas dessas restrições foram omitidas de modo a simplificar a descrição.
| Designador de velocidade-V | Descrição |
|---|---|
| V1 | A velocidade além da qual a decolagem não deve mais ser abortada (Ver Definições da V1 abaixo).[7][8][9] |
| V2 | Velocidade segura de decolagem. A velocidade na qual a aeronave pode ser subida com segurança com um motor inoperante.[7][8][9] |
| V2min | Velocidade segura mínima de decolagem.[7][8][9] |
| V3 | Velocidade de retração de flaps.[8][9] |
| V4 | Velocidade de subida inicial constante. A velocidade de subida de decolagem com todos os motores operando, usada até o ponto no qual a aceleração até a velocidade de retração dos flaps é iniciada. Deve ser atingida a uma altitude bruta de 400 ft (122 m).[10] |
| VA | Velocidade de manobra de projeto. Essa é a velocidade acima da qual é imprudente efetuar uma aplicação completa de qualquer controle de voo (ou "puxar até a parada"), pois pode gerar uma força maior do que as limitações estruturais da aeronave.[7][8][9][11] |
| Vat | Velocidade indicada no limite, que é usualmente igual à velocidade de estol VS0 multiplicada por 1,3 ou à velocidade de estol VS1g multiplicada por 1,23 na configuração de pouso com a massa de pouso máxima certificada, embora alguns fabricantes apliquem critérios diferentes. Se ambas VS0 e VS1g estão disponíveis, a maior Vat resultante deve ser aplicada.[12] Também chamada de "velocidade de aproximação". |
| VB | Velocidade para intensidade máxima de rajadas de projeto.[7][8][9] |
| VC | Velocidade de cruzeiro de projeto, usada para mostrar conformidade com o carregamento de intensidade de rajada.[13] |
| Vcef | Ver V1; geralmente usada em documentação de desempenho de aeronaves militares. Denota a velocidade de "falha do motor crítico" como a velocidade durante a decolagem na qual a mesma distância seria necessária para ou continuar a decolagem ou abortar até a parada.[14] |
| VD | Velocidade de mergulho de projeto, a maior velocidade planejada a ser alcançada nos testes.[7][8][9] |
| VDF | Velocidade de mergulho demonstrada em voo, a maior velocidade real alcançada nos testes.[7][8][9] |
| VEF | A velocidade na qual é assumida que o motor crítico irá falhar durante a decolagem.[7] |
| VF | Velocidade de flap de projeto.[7][8][9] |
| VFC | Velocidade máxima para características de estabilidade.[7][9] |
| VFE | Velocidade máxima com flaps estendidos.[7][8][9] |
| VFTO | Velocidade de decolagem final.[7] |
| VH | Velocidade máxima em voo estável com potência máxima contínua.[7][8][9] |
| VLE | Velocidade máxima de trem de pouso baixado. Esta é a velocidade máxima na qual uma aeronave de trem retraível deve ser voada com o trem de pouso baixado.[7][8][9][15] |
| VLO | Velocidade máxima com trem de pouso em movimento. Esta é a velocidade máxima na qual o trem de pouso em uma aeronave de trem retraível deve ser baixado ou retraído.[7][9][15] |
| VLOF | Velocidade de saída do solo.[7][9] |
| VMC | Velocidade mínima de controle. A velocidade mínima na qual a aeronave ainda é controlável com o motor crítico inoperante.[7] Assim como a velocidade de estol, existem várias variáveis importantes que são usadas nesta determinação. Consulte o artigo velocidade mínima de controle para uma explicação detalhada. VMC é algumas vezes ainda mais refinado em velocidades críticas mais discretas, como VMCA e VMCG. |
| VMCA | Velocidade mínima de controle ar. A velocidade mínima na qual a aeronave ainda é controlável com o motor crítico inoperante[16] enquanto a aeronave está no ar. VMCA é algumas vezes referida simplesmente como VMC. |
| VMCG | Velocidade mínima de controle solo. A velocidade mínima na qual a aeronave ainda é controlável com o motor crítico inoperante[16] enquanto a aeronave está no solo. |
| VMCL | Velocidade mínima de controle na configuração de pouso com um motor inoperante.[9][16] |
| VMO | Velocidade limite máxima em operação.[7][8][9] Exceder a VMO pode acionar um alarme de sobrevelocidade.[17] |
| VMU | Velocidade mínima de decolagem abusiva.[7][8][9] |
| VNE | Velocidade nunca a ser excedida.[7][8][9][18] |
| VNO | Velocidade máxima estrutural de cruzeiro ou velocidade máxima para operações normais.[7][8][9] |
| VO | Velocidade máxima de manobra em operação.[19] |
| VR | Velocidade de rotação (rotation). A velocidade na qual o piloto começa a aplicar entradas de controle para fazer com que o nariz da aeronave suba, após o que ela sairá do chão. |
| Vrot | Usada em vez da VR (em discussões do desempenho de decolagem de aeronaves militares) para denotar a velocidade de rotação em conjunto com o termo Vref (velocidade de rejeição).[14] |
| VRef | Velocidade de pouso de referência ou velocidade de cruzamento do limite.[7][8][9]
(Em discussões do desempenho de decolagem de aeronaves militares, o termo Vref significa velocidade de rejeição. Velocidade de rejeição é a velocidade máxima durante a decolagem a partir da qual o veículo aéreo pode parar dentro do comprimento restante disponível da pista para uma altitude, peso e configuração especificada).[14] Incorretamente, ou como uma abreviação, alguma documentação refere-se às velocidades Vref e/ou Vrot como "Vr".[20] |
| VS | Velocidade de estol, ou velocidade mínima de voo estável, para a qual a aeronave ainda é controlável.[7][8][9] |
| VS0 | Velocidade de estol, ou velocidade mínima de voo estável, na configuração de pouso.[7][8][9] |
| VS1 | Velocidade de estol, ou velocidade mínima de voo estável, para a qual a aeronave ainda é controlável em uma configuração específica.[7][8] |
| VSR | Velocidade de estol de referência.[7] |
| VSR0 | Velocidade de estol de referência na configuração de pouso.[7] |
| VSR1 | Velocidade de estol de referência em uma configuração específica.[7] |
| VSW | Velocidade na qual o aviso de estol irá soar.[7] |
| VTOSS | Velocidade segura de decolagem para aeronaves de asas rotativas Categoria A.[7][18] |
| VX | Velocidade que permitirá o melhor ângulo de subida.[7][8] |
| VY | Velocidade que permitirá a melhor razão de subida.[7][8] |
Outras velocidades-V
editarAlgumas dessas velocidades-V-são específicas para tipos particulares de aeronave e não são definidos por regulamentos.
| Designador de velocidade-V | Descrição |
|---|---|
| VBE | Velocidade de melhor resistência – a velocidade que fornece o melhor tempo em voo em relação ao consumo de combustível. |
| VBG | Velocidade de melhor planeio sem potência – a velocidade que fornece a máxima razão de planeio e, assim, a maior distância de planeio disponível. |
| VBR | Velocidade de melhor alcance – a velocidade que fornece o melhor alcance em relação ao consumo de combustível – muitas vezes idêntica à Vmd.[21] |
| VFS | Segmento final de uma decolagem com um motor tendo falhado.[22] |
| Vimd | Arrasto mínimo.[23] |
| Vimp | Potência mínima.[23] |
| VLLO | Velocidade máxima com a luz de pouso em operação – para aeronaves com luzes de pouso retraíveis.[9] |
| Vmbe | Velocidade máxima de energia de frenagem.[23][24] |
| Vmd | Arrasto mínimo (por sustentação) – muitas vezes idêntica à VBR[21][24] (alternativamente igual à Vimd).[25] |
| Vmin | Velocidade mínima para voo por instrumentos (IFR) para helicópteros.[18] |
| Vmp | Potência mínima.[24] |
| Vms | Velocidade mínima de mergulho no carregamento médio da asa - a velocidade na qual a taxa mínima de descida é obtida. Em planadores modernos, Vms e Vmc evoluíram para o mesmo valor.[26] |
| Vp | Velocidade de aquaplanagem.[27] |
| VPD | Velocidade máxima na qual foi demonstrada o funcionamento do paraquedas para aeronave inteira.[28] |
| Vra | Velocidade aproximada do ar (velocidade de penetração em turbulência).[9] |
| VSL | Velocidade de estol em uma configuração específica.[9][24] |
| Vs1g | Velocidade de estol em um fator de carga de 1G. |
| Vsse | Velocidade de segurança para único motor.[29] |
| Vt | Velocidade limite.[24] |
| VTD | Velocidade de toque no solo.[30] |
| VTGT | Velocidade alvo. |
| VTO | Velocidade de saída do solo (ver também VLOF).[31] |
| Vtocs | Velocidade de subida de decolagem (helicópteros).[18] |
| Vtos | Velocidade mínima para uma taxa de subida positiva com um motor inoperante.[24] |
| Vtmax | Velocidade limite máxima.[24][32] |
| Vwo | Velocidade máxima de operação da abertura da janela ou canopi.[33] |
| VXSE | Melhor ângulo de velocidade de subida com um único motor operante em uma aeronave leve bimotora – a velocidade que fornece o maior ganho de altitude por unidade de distância horizontal após uma falha de motor, enquanto mantendo um pequeno ângulo de inclinação que deve ser apresentado com os dados de desempenho de subida sem um motor.[29] |
| VYSE | Melhor taxa de velocidade de subida com um único motor operante em uma aeronave leve bimotora – a velocidade que fornece o maior ganho de altitude por unidade de tempo após uma falha de motor, enquanto mantendo um pequeno ângulo de inclinação que deve ser apresentado com os dados de desempenho de subida sem um motor.[15][29] |
| VZRC | Velocidade de taxa zero de subida em uma aeronave bimotora.[24] |
Números de Mach
editarSempre que uma velocidade limitante é expressa por um número de Mach, é expressada relativamente à velocidade do som, ou seja, VMO: Velocidade máxima de operação, MMO: Número de Mach máximo de operação.[7][8]
Definições da V1
editarV1 é a velocidade de reconhecimento de falha do motor crítico ou a velocidade de decisão de decolagem. É a velocidade acima da qual a decolagem irá continuar mesmo que um motor falhe ou outro problema ocorra, como o estouro de um pneu.[9] A velocidade irá variar entre os tipos de aeronaves, e varia de acordo com fatores como o peso da aeronave, comprimento da pista, configuração dos flaps das asas, empuxo do motor usado e contaminação da superfície da pista, assim deve ser determinada pelo piloto anteriormente à decolagem. Abortar uma decolagem após V1 é fortemente desencorajado, pois a aeronave por definição não será capaz de parar antes do fim da pista, assim sofrendo uma "excursão de pista".[34]
V1 é definida diferentemente em diferentes jurisdições:
- A Administração Federal de Aviação americana, bem como a Agência Nacional de Aviação Civil brasileira, definem-na como: "velocidade máxima na decolagem na qual o piloto deve executar a primeira ação (por exemplo, aplicar freios, reduzir potência, abrir freios aerodinâmicos) para parar o avião dentro da distância da aceleração e parada. Significa, também, a menor velocidade na decolagem, seguindo-se a uma falha do motor crítico na VEF, na qual o piloto pode continuar a decolagem e atingir a altura requerida acima da superfície de decolagem dentro da distância de decolagem."[nota 1][35]
- A Transport Canada define-a como: "Velocidade de reconhecimento de falha no motor crítico" e acrescenta: "Essa definição não é restritiva. Um operador pode adotar qualquer outra definição descrita no manual de voo da aeronave (AFM) de uma aeronave aprovada por tipo pela TC, desde que tal definição não comprometa a segurança operacional da aeronave."[nota 2]
- A Agência Europeia para a Segurança da Aviação, que regula a aviação na Europa, define-a como: "a velocidade calibrada no solo no qual, como resultado de uma falha de motor ou outros motivos, é assumido que o piloto tomou uma decisão para continuar ou descontinuar a decolagem. A velocidade de decisão de decolagem, V1, deve ser selecionada para o avião mas não deve ser menor que a VEF somada à velocidade ganha com o motor crítico inoperante durante o intervalo de tempo entre o instante no qual o motor crítico falha e o instante no qual o piloto reconhece e reage à falha do motor, como indicado pela aplicação do piloto do primeiro meio retardante durante a determinação de aceleração e parada da CS 23.55."[nota 3] A determinação da CS 23.55 é a seguinte: "CS 23.55 Distância de aceleração e parada Para cada avião da categoria comutador, a distância de aceleração e parada deve ser determinada como segue: (a) A distância de aceleração e parada é a soma das distâncias necessárias para – (1) Acelerar o avião de uma partida parada para a VEF com todos os motores operantes; (2) Acelerar o avião da VEF para a V1, assumindo que o motor crítico falhe na VEF; e (3) Parar completamente do ponto no qual a V1 é alcançada. (b) Meios além do freio de roda podem ser usados para determinar as distâncias de aceleração e parada se tais meios – (1) É seguro e confiável; e (2) É usado de tal modo que resultados consistentes possam ser esperados durante condições normais de operação."[nota 4]
- ↑ Tradução livre. Texto original: "V1 means the maximum speed in the takeoff at which the pilot must take the first action (e.g., apply brakes, reduce thrust, deploy speed brakes) to stop the airplane within the accelerate-stop distance. V1 also means the minimum speed in the takeoff, following a failure of the critical engine at VEF, at which the pilot can continue the takeoff and achieve the required height above the takeoff surface within the takeoff distance."[7]
- ↑ Tradução livre. Texto original: "Critical engine failure recognition speed* *This definition is not restrictive. An operator may adopt any other definition outlined in the aircraft flight manual (AFM) of TC type-approved aircraft as long as such definition does not compromise operational safety of the aircraft."[8]
- ↑ Tradução livre. Texto original: "The take-off decision speed, V1, is the calibrated airspeed on the ground at which, as a result of engine failure or other reasons, the pilot is assumed to have made a decision to continue or discontinue the take-off. The take-off decision speed, V1, must be selected for the aeroplane but must not be less than VEF plus the speed gained with the critical engine inoperative during the time interval between the instant at which the critical engine is failed and the instant at which the pilot recognises and reacts to the engine failure, as indicated by the pilot’s application of the first retarding means during the accelerate-stop determination of CS 23.55."[36]
- ↑ Tradução livre. Texto original: "CS 23.55 Accelerate-stop distance For each commuter category aeroplane, the accelerate-stop distance must be determined as follows: (a) The accelerate-stop distance is the sum of the distances necessary to – (1) Accelerate the aeroplane from a standing start to VEF with all engines operating; (2) Accelerate the aeroplane from VEF to V1, assuming the critical engine fails at VEF; and (3) Come to a full stop from the point at which V1 is reached. (b) Means other than wheel-brakes may be used to determine the accelerate-stop distances if that means – (1) Is safe and reliable; and (2) Is used so that consistent results can be expected under normal operating conditions."[36]
- ↑ Love, Michael C. (2005). «2». Better Takeoffs & Landings. [S.l.]: Mc-Graw Hill. pp. 13–15. ISBN 0-07-038805-9. Consultado em 7 de maio de 2008
- ↑ Craig, Paul A. (2004). «1». Multiengine Flying 3rd ed. [S.l.]: McGraw Hill. pp. 3–6. ISBN 0-07-142139-4. Consultado em 7 de maio de 2008
- ↑ Administração Federal de Aviação (julho de 2008). «Title 14: Aeronautics and Space PART 23—AIRWORTHINESS STANDARDS: NORMAL, UTILITY, ACROBATIC, AND COMMUTER CATEGORY AIRPLANES Subpart G—Operating Limitations and Information Markings And Placards, Part 23, §23.1545». Consultado em 1 de agosto de 2008. Arquivado do original em 29 de setembro de 2006
- ↑ «Pilot's Handbook of Aeronautical Knowledge – Chapter 7» (PDF). FAA. Consultado em 29 de janeiro de 2010. Arquivado do original (PDF) em 3 de setembro de 2013
- ↑ «Pilot's Handbook of Aeronautical Knowledge – Chapter 8» (PDF). FAA. Consultado em 29 de janeiro de 2010. Arquivado do original (PDF) em 3 de setembro de 2013
- ↑ Administração Federal de Aviação (julho de 2008). «Title 14: Aeronautics and Space PART 25—AIRWORTHINESS STANDARDS: TRANSPORT CATEGORY AIRPLANES Subpart G—Operating Limitations and Information Airplane Flight Manual, Part 25, §25.1583». Consultado em 1 de agosto de 2008. Arquivado do original em 29 de setembro de 2006
- ↑ a b c d e f g h i j k l m n o p q r s t u v w x y z aa ab ac ad ae af ag ah ai «Electronic Code of Federal Regulations – Chapter 14.1». Administração Federal de Aviação. Consultado em 7 de maio de 2008
- ↑ a b c d e f g h i j k l m n o p q r s t u v w x y Transport Canada (outubro de 2012). «Aeronautical Information Manual GEN – 1.0 GENERAL INFORMATION» (PDF). Consultado em 1 de janeiro de 2013
- ↑ a b c d e f g h i j k l m n o p q r s t u v w x y z aa Peppler, I.L.: From The Ground Up, page 327. Aviation Publishers Co. Limited, Ottawa Ontario, Twenty Seventh Revised Edition, 1996. ISBN 0-9690054-9-0
- ↑ CAP 698: Civil Aviation Authority JAR-FCL Examinations: Aeroplane Performance Manual (PDF). [S.l.]: Civil Aviation Authority (United Kingdom). 2006. pp. Section 4–MRJT1 Page 3. ISBN 0-11-790653-0. Consultado em 9 de dezembro de 2009. Arquivado do original (PDF) em 14 de novembro de 2009
- ↑ FAA Advisory Circular 23-19A Airframe Guide for Certification of Part 23 Airplanes, Section 48 (p.27) Retrieved 2012-01-06
- ↑ PANS-OPS, Volume I, Part I, Section 4, Chapter 1, 1.3.3
- ↑ FAR Part 23.335
- ↑ a b c MIL-STD-3013A
- ↑ a b c Pilot's Encyclopedia of Aeronautical Knowledge. [S.l.]: Administração Federal de Aviação. 2007. pp. G–16. ISBN 978-1-60239-034-8. Consultado em 12 de maio de 2008
- ↑ a b c Administração Federal de Aviação. (fevereiro de 2009). «Title 14: Aeronautics and Space PART 25—AIRWORTHINESS STANDARDS: TRANSPORT CATEGORY AIRPLANES Subpart B—Flight Controllability and Maneuverability § 25.149 Minimum control speed.». Consultado em 16 de fevereiro de 2009. Arquivado do original em 4 de outubro de 2010
- ↑ Administration, Federal Aviation (2017). Airplane Flying Handbook: FAA-H-8083-3B (em inglês). [S.l.]: Skyhorse Publishing, Inc. p. 15-9. ISBN 9781510712843. Consultado em 3 de outubro de 2017
- ↑ a b c d Bell Helicopter Textron: Bell Model 212 Rotorcraft Flight Manual, page II. Bell Helicopters Textron Publishers, Fort Worth, Texas, Revision 3, 1 May 1998. BHT-212IFR-FM-1
- ↑ USA 14CFR §23.1557 Retrieved 2012-01-06
- ↑ TPUB INTERMEDIATE FLIGHT PREPARATION WORKBOOK APPENDIX A
- ↑ a b Brandon, John (outubro de 2008). «Flight Theory: Airspeed and the properties of air». FlySafe.raa.asn.au. Cópia arquivada em 1 de novembro de 2008
- ↑ airplanedriver.net. «Cessna Citation». Consultado em 14 de fevereiro de 2009
- ↑ a b c Bristow, Gary. Ace the Technical Pilot Interview. [S.l.: s.n.] Consultado em 20 de janeiro de 2009
- ↑ a b c d e f g h Croucher, Phil (2007). Canadian Professional Pilot Studies. [S.l.: s.n.] Consultado em 20 de janeiro de 2009
- ↑ «Transportation Safety Board of Canada – A05W0109». Consultado em 26 de março de 2010
- ↑ «Wills Wing Hang Glider Mfg.». Consultado em 31 de maio de 2016
- ↑ Croucher, Phil (2007). Canadian Professional Pilot Studies. [S.l.: s.n.] Consultado em 20 de janeiro de 2009
- ↑ «SR20 Pilot's Operating Handbook». Cirrus Design. 2004: 8.
- ↑ a b c Flight Sim Aviation (2009). «Aviation Rules of Thumb – V-Speeds Abbreviations List». Consultado em 19 de janeiro de 2009
- ↑ E.G. Tulapurkara, Chapter 10 Performance analysis VI – Take-off and landing, retrieved 18 November 2015
- ↑ «C-130 Takeoff and Landing Data Card» [Cartão de Dados de Decolagem e Pouso do C-130] (PDF) (em inglês). Elite Electronic Engineering, Inc. Consultado em 18 de agosto de 2018. Cópia arquivada (PDF) em 19 de agosto de 2018
- ↑ TheFreeDictionary (2009). «VTMAX» (em inglês). Consultado em 19 de janeiro de 2009
- ↑ Blue Ridge Air Works. «Cessna 152 – 4843H General Info» [Informações Gerais do Cessna 152 – 4843H] (em inglês). Consultado em 13 de fevereiro de 2009. Arquivado do original em 5 de julho de 2008
- ↑ «Takeoff Safety Training Aid» [Auxílio de Treinamento de Segurança de Decolagem] (PDF) (em inglês). Associação Internacional de Transportes Aéreos. 3 páginas.
V1. [...](1) The maximum speed by which a rejected takeoff must be initiated to assure that a safe stop can be completed within the remaining runway, or runway and stopway;
- ↑ «Regulamento Brasileiro da Aviação Civil nº 01: definições, regras de redação e unidades de medida para uso nos RBAC» (PDF). Agência Nacional de Aviação Civil. Emenda nº 03. 7 de junho de 2018. Consultado em 18 de agosto de 2018
- ↑ a b «CS-23: EASA Certification Specifications and Acceptable Means of Compliance for Normal, Utility, Aerobatic, and Commuter Category Aeroplanes» [Especificações para Certificação e Meios Aceitáveis de Conformidade da EASA para Aeronaves de Categoria Normal, Utilitária, Acrobática e Comutadora] (PDF). Agência Europeia para a Segurança da Aviação (em inglês). Amendment 4. 16 de julho de 2015. Consultado em 18 de agosto de 2018
Leitura adicional
editar- Getting to grips with aircraft performance (PDF). Flight Operations Support & Line Assistance. [S.l.]: Airbus Customer Services. Janeiro de 2002