1. Introduction

OpenThread released by Nest is an open-source implementation of the Thread® networking protocol. Nest has released OpenThread to make the technology used in Nest products broadly available to developers to accelerate the development of products for the connected home.
The Thread specification defines an IPv6-based reliable, secure and low-power wireless device-to-device communication protocol for home applications. OpenThread implements all Thread networking layers including IPv6, 6LoWPAN, IEEE 802.15.4 with MAC security, Mesh Link Establishment, and Mesh Routing.
In this Codelab, you'll use OpenThread APIs to start a Thread network, monitor and react to changes in device roles, and send UDP messages, as well as tie these actions to buttons and LEDs on real hardware.
What you'll learn
- How to program the buttons and LEDs on Nordic nRF52840 dev boards
- How to use common OpenThread APIs and the
otInstanceclass - How to monitor and react to OpenThread state changes
- How to send UDP messages to all devices in a Thread network
- How to modify Makefiles
What you'll need
Hardware:
- 3 Nordic Semiconductor nRF52840 dev boards
- 3 USB to Micro-USB cables to connect the boards
- A Linux machine with at least 3 USB ports
Software:
- GNU Toolchain
- Nordic nRF5x command line tools
- Segger J-Link software
- OpenThread
- Git
Except as otherwise noted, the content of this Codelab is licensed under the Creative Commons Attribution 3.0 License, and code samples are licensed under the Apache 2.0 License.
2. Getting started
Complete the Hardware Codelab
Before starting this Codelab, you should complete the Build a Thread Network with nRF52840 Boards and OpenThread Codelab, which:
- Details all the software you need for building and flashing
- Teaches you how to build OpenThread and flash it on Nordic nRF52840 boards
- Demonstrates the basics of a Thread network
None of the environment set up required to build OpenThread and flash the boards is detailed in this Codelab—only basic instructions for flashing the boards. It is assumed you have already completed the Build a Thread Network Codelab.
Linux machine
This Codelab was designed to use an i386- or x86-based Linux machine to flash all Thread development boards. All steps were tested on Ubuntu 14.04.5 LTS (Trusty Tahr).
Nordic Semiconductor nRF52840 boards
This Codelab uses three nRF52840 PDK boards.

Install Software
To build and flash OpenThread, you need to install SEGGER J-Link, the nRF5x Command Line tools, the ARM GNU Toolchain, and various Linux packages. If you have completed the Build a Thread Network Codelab as required, you will already have everything you need installed. If not, complete that Codelab before continuing to ensure you can build and flash OpenThread to nRF52840 dev boards.
3. Clone the repository
OpenThread comes with example application code you can use as a starting point for this Codelab.
Clone the OpenThread Nordic nRF528xx examples repo and build OpenThread:
$ git clone --recursive https://github.com/openthread/ot-nrf528xx $ cd ot-nrf528xx $ ./script/bootstrap
4. OpenThread API Basics
OpenThread's public APIs are located at ./openthread/include/openthread in the OpenThread repository. These APIs provide access to a variety of OpenThread features and functionality at both a Thread- and platform-level for use in your applications:
- OpenThread instance information and control
- Application services such as IPv6, UDP, and CoAP
- Network credential management, along with Commissioner and Joiner roles
- Border Router management
- Enhanced features such as Child Supervision and Jam Detection
Reference information on all OpenThread APIs are available at openthread.io/reference.
Using an API
To use an API, include its header file in one of your application files. Then call the desired function.
For example, the CLI example app included with OpenThread uses the following API headers:
./openthread/examples/apps/cli/main.c
#include <openthread/config.h> #include <openthread/cli.h> #include <openthread/diag.h> #include <openthread/tasklet.h> #include <openthread/platform/logging.h>
The OpenThread instance
The otInstance structure is something you'll use frequently when working with the OpenThread APIs. Once initialized, this structure represents a static instance of the OpenThread library and allows the user to make OpenThread API calls.
For example, the OpenThread instance is initialized in the main() function of the CLI example app:
./openthread/examples/apps/cli/main.c
int main(int argc, char *argv[])
{
otInstance *instance
...
#if OPENTHREAD_ENABLE_MULTIPLE_INSTANCES
// Call to query the buffer size
(void)otInstanceInit(NULL, &otInstanceBufferLength);
// Call to allocate the buffer
otInstanceBuffer = (uint8_t *)malloc(otInstanceBufferLength);
assert(otInstanceBuffer);
// Initialize OpenThread with the buffer
instance = otInstanceInit(otInstanceBuffer, &otInstanceBufferLength);
#else
instance = otInstanceInitSingle();
#endif
...
return 0;
}
Platform-specific functions
If you want to add platform-specific functions to one of the example applications included with OpenThread, first declare them in the ./openthread/examples/platforms/openthread-system.h header, using the otSys namespace for all functions. Then implement them in a platform-specific source file. Abstracted this way, you can use the same function headers for other example platforms.
For example, the GPIO functions we're going to use to hook into the nRF52840 buttons and LEDs must be declared in openthread-system.h.
Open the ./openthread/examples/platforms/openthread-system.h file in your preferred text editor.
./openthread/examples/platforms/openthread-system.h
ACTION: Add platform-specific GPIO function declarations.
Add these function declarations after the #include for the openthread/instance.h header:
/** * Init LED module. * */ void otSysLedInit(void); void otSysLedSet(uint8_t aLed, bool aOn); void otSysLedToggle(uint8_t aLed); /** * A callback will be called when GPIO interrupts occur. * */ typedef void (*otSysButtonCallback)(otInstance *aInstance); void otSysButtonInit(otSysButtonCallback aCallback); void otSysButtonProcess(otInstance *aInstance);
We'll implement these in the next step.
Note that the otSysButtonProcess function declaration uses an otInstance. That way the application can access information about the OpenThread instance when a button is pressed, if needed. It all depends on the needs of your application. If you don't need it in your implementation of the function, you can use the OT_UNUSED_VARIABLE macro from the OpenThread API to suppress build errors around unused variables for some toolchains. We'll see examples of this later.
5. Implement GPIO platform abstraction
In the previous step, we went over the platform-specific function declarations in ./openthread/examples/platforms/openthread-system.h that can be used for GPIO. In order to access buttons and LEDs on the nRF52840 dev boards, you need to implement those functions for the nRF52840 platform. In this code, you'll add functions that:
- Initialize GPIO pins and modes
- Control the voltage on a pin
- Enable GPIO interrupts and register a callback
In the ./src/src directory, create a new file named gpio.c. In this new file, add the following content.
./src/src/gpio.c (new file)
ACTION: Add defines.
These defines serve as abstractions between nRF52840-specific values and variables used at the OpenThread application level.
/** * @file * This file implements the system abstraction for GPIO and GPIOTE. * */ #define BUTTON_GPIO_PORT 0x50000300UL #define BUTTON_PIN 11 // button #1 #define GPIO_LOGIC_HI 0 #define GPIO_LOGIC_LOW 1 #define LED_GPIO_PORT 0x50000300UL #define LED_1_PIN 13 // turn on to indicate leader role #define LED_2_PIN 14 // turn on to indicate router role #define LED_3_PIN 15 // turn on to indicate child role #define LED_4_PIN 16 // turn on to indicate UDP receive
For more information on nRF52840 buttons and LEDs, see the Nordic Semiconductor Infocenter.
ACTION: Add header includes.
Next, add the header includes you'll need for GPIO functionality.
/* Header for the functions defined here */ #include "openthread-system.h" #include <string.h> /* Header to access an OpenThread instance */ #include <openthread/instance.h> /* Headers for lower-level nRF52840 functions */ #include "platform-nrf5.h" #include "hal/nrf_gpio.h" #include "hal/nrf_gpiote.h" #include "nrfx/drivers/include/nrfx_gpiote.h"
ACTION: Add callback and interrupt functions for Button 1.
Add this code next. The in_pin1_handler function is the callback that is registered when the button press functionality is initialized (later in this file).
Note how this callback uses the OT_UNUSED_VARIABLE macro, as the variables passed to in_pin1_handler aren't actually used in the function.
/* Declaring callback function for button 1. */
static otSysButtonCallback sButtonHandler;
static bool sButtonPressed;
/**
* @brief Function to receive interrupt and call back function
* set by the application for button 1.
*
*/
static void in_pin1_handler(uint32_t pin, nrf_gpiote_polarity_t action)
{
OT_UNUSED_VARIABLE(pin);
OT_UNUSED_VARIABLE(action);
sButtonPressed = true;
}
ACTION: Add a function to configure the LEDs.
Add this code to configure the mode and state of all LEDs during initialization.
/**
* @brief Function for configuring: PIN_IN pin for input, PIN_OUT pin for output,
* and configures GPIOTE to give an interrupt on pin change.
*/
void otSysLedInit(void)
{
/* Configure GPIO mode: output */
nrf_gpio_cfg_output(LED_1_PIN);
nrf_gpio_cfg_output(LED_2_PIN);
nrf_gpio_cfg_output(LED_3_PIN);
nrf_gpio_cfg_output(LED_4_PIN);
/* Clear all output first */
nrf_gpio_pin_write(LED_1_PIN, GPIO_LOGIC_LOW);
nrf_gpio_pin_write(LED_2_PIN, GPIO_LOGIC_LOW);
nrf_gpio_pin_write(LED_3_PIN, GPIO_LOGIC_LOW);
nrf_gpio_pin_write(LED_4_PIN, GPIO_LOGIC_LOW);
/* Initialize gpiote for button(s) input.
Button event handlers are set in the application (main.c) */
ret_code_t err_code;
err_code = nrfx_gpiote_init();
APP_ERROR_CHECK(err_code);
}
ACTION: Add a function to set the mode of an LED.
This function will be used when the device's role changes.
/**
* @brief Function to set the mode of an LED.
*/
void otSysLedSet(uint8_t aLed, bool aOn)
{
switch (aLed)
{
case 1:
nrf_gpio_pin_write(LED_1_PIN, (aOn == GPIO_LOGIC_HI));
break;
case 2:
nrf_gpio_pin_write(LED_2_PIN, (aOn == GPIO_LOGIC_HI));
break;
case 3:
nrf_gpio_pin_write(LED_3_PIN, (aOn == GPIO_LOGIC_HI));
break;
case 4:
nrf_gpio_pin_write(LED_4_PIN, (aOn == GPIO_LOGIC_HI));
break;
}
}
ACTION: Add a function to toggle the mode of an LED.
This function will be used to toggle LED4 when the device receives a multicast UDP message.
/**
* @brief Function to toggle the mode of an LED.
*/
void otSysLedToggle(uint8_t aLed)
{
switch (aLed)
{
case 1:
nrf_gpio_pin_toggle(LED_1_PIN);
break;
case 2:
nrf_gpio_pin_toggle(LED_2_PIN);
break;
case 3:
nrf_gpio_pin_toggle(LED_3_PIN);
break;
case 4:
nrf_gpio_pin_toggle(LED_4_PIN);
break;
}
}
ACTION: Add functions to initialize and process button presses.
The first function initializes the board for a button press, and the second sends the multicast UDP message when Button 1 is pressed.
/**
* @brief Function to initialize the button.
*/
void otSysButtonInit(otSysButtonCallback aCallback)
{
nrfx_gpiote_in_config_t in_config = NRFX_GPIOTE_CONFIG_IN_SENSE_LOTOHI(true);
in_config.pull = NRF_GPIO_PIN_PULLUP;
ret_code_t err_code;
err_code = nrfx_gpiote_in_init(BUTTON_PIN, &in_config, in_pin1_handler);
APP_ERROR_CHECK(err_code);
sButtonHandler = aCallback;
sButtonPressed = false;
nrfx_gpiote_in_event_enable(BUTTON_PIN, true);
}
void otSysButtonProcess(otInstance *aInstance)
{
if (sButtonPressed)
{
sButtonPressed = false;
sButtonHandler(aInstance);
}
}
ACTION: Save and close the gpio.c file.
6. API: React to device role changes
In our application, we want different LEDs to light up depending on the device role. Let's track the following roles: Leader, Router, End Device. We can assign them to LEDs like so:
- LED1 = Leader
- LED2 = Router
- LED3 = End Device
To enable this functionality, the application needs to know when the device role has changed and how to turn on the correct LED in response. We'll use the OpenThread instance for the first part, and the GPIO platform abstraction for the second.
Open the ./openthread/examples/apps/cli/main.c file in your preferred text editor.
./openthread/examples/apps/cli/main.c
ACTION: Add header includes.
In the includes section of the main.c file, add the API header files you'll need for the role change feature.
#include <openthread/instance.h> #include <openthread/thread.h> #include <openthread/thread_ftd.h>
ACTION: Add handler function declaration for the OpenThread instance state change.
Add this declaration to main.c, after the header includes and before any #if statements. This function will be defined after the main application.
void handleNetifStateChanged(uint32_t aFlags, void *aContext);
ACTION: Add a callback registration for the state change handler function.
In main.c, add this function to the main() function after the otAppCliInit call. This callback registration tells OpenThread to call the handleNetifStateChange function whenever the OpenThread instance state changes.
/* Register Thread state change handler */ otSetStateChangedCallback(instance, handleNetifStateChanged, instance);
ACTION: Add the state change implementation.
In main.c, after the main() function, implement the handleNetifStateChanged function. This function checks the OT_CHANGED_THREAD_ROLE flag of the OpenThread instance and if it has changed, turns LEDs on/off as needed.
void handleNetifStateChanged(uint32_t aFlags, void *aContext)
{
if ((aFlags & OT_CHANGED_THREAD_ROLE) != 0)
{
otDeviceRole changedRole = otThreadGetDeviceRole(aContext);
switch (changedRole)
{
case OT_DEVICE_ROLE_LEADER:
otSysLedSet(1, true);
otSysLedSet(2, false);
otSysLedSet(3, false);
break;
case OT_DEVICE_ROLE_ROUTER:
otSysLedSet(1, false);
otSysLedSet(2, true);
otSysLedSet(3, false);
break;
case OT_DEVICE_ROLE_CHILD:
otSysLedSet(1, false);
otSysLedSet(2, false);
otSysLedSet(3, true);
break;
case OT_DEVICE_ROLE_DETACHED:
case OT_DEVICE_ROLE_DISABLED:
/* Clear LED4 if Thread is not enabled. */
otSysLedSet(4, false);
break;
}
}
}
7. API: Use multicast to turn on an LED
In our application, we also want to send UDP messages to all other devices in the network when Button1 is pressed on one board. To confirm receipt of the message, we'll toggle LED4 on the other boards in response.
To enable this functionality, the application needs to:
- Initialize a UDP connection upon start up
- Be able to send a UDP message to the mesh-local multicast address
- Handle incoming UDP messages
- Toggle LED4 in response to incoming UDP messages
Open the ./openthread/examples/apps/cli/main.c file in your preferred text editor.
./openthread/examples/apps/cli/main.c
ACTION: Add header includes.
In the includes section at the top of the main.c file, add the API header files you'll need for the multicast UDP feature.
#include <string.h> #include <openthread/message.h> #include <openthread/udp.h> #include "utils/code_utils.h"
The code_utils.h header is used for the otEXPECT and otEXPECT_ACTION macros that validate run-time conditions and gracefully handle errors.
ACTION: Add defines and constants:
In the main.c file, after the includes section and before any #if statements, add UDP-specific constants and defines:
#define UDP_PORT 1212 static const char UDP_DEST_ADDR[] = "ff03::1"; static const char UDP_PAYLOAD[] = "Hello OpenThread World!";
ff03::1 is the mesh-local multicast address. Any messages sent to this address will be sent to all Full Thread Devices in the network. See Multicast on openthread.io for more information on multicast support in OpenThread.
ACTION: Add function declarations.
In the main.c file, after the otTaskletsSignalPending definition and before the main() function, add UDP-specific functions, as well as a static variable to represent a UDP socket:
static void initUdp(otInstance *aInstance);
static void sendUdp(otInstance *aInstance);
static void handleButtonInterrupt(otInstance *aInstance);
void handleUdpReceive(void *aContext, otMessage *aMessage,
const otMessageInfo *aMessageInfo);
static otUdpSocket sUdpSocket;
ACTION: Add calls to initialize the GPIO LEDs and button.
In main.c, add these function calls to the main() function after the otSetStateChangedCallback call. These functions initialize the GPIO and GPIOTE pins and set a button handler to handle button push events.
/* init GPIO LEDs and button */ otSysLedInit(); otSysButtonInit(handleButtonInterrupt);
ACTION: Add the UDP initialization call.
In main.c, add this function to the main() function after the otSysButtonInit call you just added:
initUdp(instance);
This call ensures a UDP socket is initialized upon application start up. Without this, the device cannot send or receive UDP messages.
ACTION: Add call to process the GPIO button event.
In main.c, add this function call to the main() function after the otSysProcessDrivers call, in the while loop. This function, declared in gpio.c, checks if the button was pressed, and if so, calls the handler (handleButtonInterrupt) which was set in the above step.
otSysButtonProcess(instance);
ACTION: Implement Button Interrupt Handler.
In main.c, add the implementation of the handleButtonInterrupt function after the handleNetifStateChanged function you added in the previous step:
/**
* Function to handle button push event
*/
void handleButtonInterrupt(otInstance *aInstance)
{
sendUdp(aInstance);
}
ACTION: Implement UDP initialization.
In main.c, add the implementation of the initUdp function after the handleButtonInterrupt function you just added:
/**
* Initialize UDP socket
*/
void initUdp(otInstance *aInstance)
{
otSockAddr listenSockAddr;
memset(&sUdpSocket, 0, sizeof(sUdpSocket));
memset(&listenSockAddr, 0, sizeof(listenSockAddr));
listenSockAddr.mPort = UDP_PORT;
otUdpOpen(aInstance, &sUdpSocket, handleUdpReceive, aInstance);
otUdpBind(aInstance, &sUdpSocket, &listenSockAddr, OT_NETIF_THREAD);
}
UDP_PORT is the port you defined earlier (1212). The otUdpOpen function opens the socket and registers a callback function (handleUdpReceive) for when a UDP message is received. otUdpBind binds the socket to the Thread network interface by passing OT_NETIF_THREAD. For other network interface options, refer to the otNetifIdentifier enumeration in UDP API Reference.
ACTION: Implement UDP messaging.
In main.c, add the implementation of the sendUdp function after the initUdp function you just added:
/**
* Send a UDP datagram
*/
void sendUdp(otInstance *aInstance)
{
otError error = OT_ERROR_NONE;
otMessage * message;
otMessageInfo messageInfo;
otIp6Address destinationAddr;
memset(&messageInfo, 0, sizeof(messageInfo));
otIp6AddressFromString(UDP_DEST_ADDR, &destinationAddr);
messageInfo.mPeerAddr = destinationAddr;
messageInfo.mPeerPort = UDP_PORT;
message = otUdpNewMessage(aInstance, NULL);
otEXPECT_ACTION(message != NULL, error = OT_ERROR_NO_BUFS);
error = otMessageAppend(message, UDP_PAYLOAD, sizeof(UDP_PAYLOAD));
otEXPECT(error == OT_ERROR_NONE);
error = otUdpSend(aInstance, &sUdpSocket, message, &messageInfo);
exit:
if (error != OT_ERROR_NONE && message != NULL)
{
otMessageFree(message);
}
}
Note the otEXPECT and otEXPECT_ACTION macros. These make sure that the UDP message is valid and allocated correctly in the buffer, and if not, the function gracefully handles errors by jumping to the exit block, where it frees up the buffer.
See the IPv6 and UDP References on openthread.io for more information about the functions used to initialize UDP.
ACTION: Implement UDP message handling.
In main.c, add the implementation of the handleUdpReceive function after the sendUdp function you just added. This function simply toggles LED4.
/**
* Function to handle UDP datagrams received on the listening socket
*/
void handleUdpReceive(void *aContext, otMessage *aMessage,
const otMessageInfo *aMessageInfo)
{
OT_UNUSED_VARIABLE(aContext);
OT_UNUSED_VARIABLE(aMessage);
OT_UNUSED_VARIABLE(aMessageInfo);
otSysLedToggle(4);
}
8. API: Configure the Thread network
For ease of demonstration, we want our devices to immediately start Thread and join together into a network when they are powered on. To do this, we'll use the otOperationalDataset structure. This structure holds all the parameters needed to transmit Thread network credentials to a device.
Use of this structure will override the network defaults built into OpenThread, to make our application more secure and limit Thread nodes in our network to only those running the application.
Again, open the ./openthread/examples/apps/cli/main.c file in your preferred text editor.
./openthread/examples/apps/cli/main.c
ACTION: Add header include.
Within the includes section at the top of the main.c file, add the API header file you'll need to configure the Thread network:
#include <openthread/dataset_ftd.h>
ACTION: Add function declaration for setting the network configuration.
Add this declaration to main.c, after the header includes and before any #if statements. This function will be defined after the main application function.
static void setNetworkConfiguration(otInstance *aInstance);
ACTION: Add the network configuration call.
In main.c, add this function call to the main() function after the otSetStateChangedCallback call. This function configures the Thread network dataset.
/* Override default network credentials */ setNetworkConfiguration(instance);
ACTION: Add calls to enable the Thread network interface and stack.
In main.c, add these function calls to the main() function after the otSysButtonInit call.
/* Start the Thread network interface (CLI cmd > ifconfig up) */ otIp6SetEnabled(instance, true); /* Start the Thread stack (CLI cmd > thread start) */ otThreadSetEnabled(instance, true);
ACTION: Implement Thread network configuration.
In main.c, add the implementation of the setNetworkConfiguration function after the main() function:
/**
* Override default network settings, such as panid, so the devices can join a
network
*/
void setNetworkConfiguration(otInstance *aInstance)
{
static char aNetworkName[] = "OTCodelab";
otOperationalDataset aDataset;
memset(&aDataset, 0, sizeof(otOperationalDataset));
/*
* Fields that can be configured in otOperationDataset to override defaults:
* Network Name, Mesh Local Prefix, Extended PAN ID, PAN ID, Delay Timer,
* Channel, Channel Mask Page 0, Network Key, PSKc, Security Policy
*/
aDataset.mActiveTimestamp.mSeconds = 1;
aDataset.mActiveTimestamp.mTicks = 0;
aDataset.mActiveTimestamp.mAuthoritative = false;
aDataset.mComponents.mIsActiveTimestampPresent = true;
/* Set Channel to 15 */
aDataset.mChannel = 15;
aDataset.mComponents.mIsChannelPresent = true;
/* Set Pan ID to 2222 */
aDataset.mPanId = (otPanId)0x2222;
aDataset.mComponents.mIsPanIdPresent = true;
/* Set Extended Pan ID to C0DE1AB5C0DE1AB5 */
uint8_t extPanId[OT_EXT_PAN_ID_SIZE] = {0xC0, 0xDE, 0x1A, 0xB5, 0xC0, 0xDE, 0x1A, 0xB5};
memcpy(aDataset.mExtendedPanId.m8, extPanId, sizeof(aDataset.mExtendedPanId));
aDataset.mComponents.mIsExtendedPanIdPresent = true;
/* Set network key to 1234C0DE1AB51234C0DE1AB51234C0DE */
uint8_t key[OT_NETWORK_KEY_SIZE] = {0x12, 0x34, 0xC0, 0xDE, 0x1A, 0xB5, 0x12, 0x34, 0xC0, 0xDE, 0x1A, 0xB5, 0x12, 0x34, 0xC0, 0xDE};
memcpy(aDataset.mNetworkKey.m8, key, sizeof(aDataset.mNetworkKey));
aDataset.mComponents.mIsNetworkKeyPresent = true;
/* Set Network Name to OTCodelab */
size_t length = strlen(aNetworkName);
assert(length <= OT_NETWORK_NAME_MAX_SIZE);
memcpy(aDataset.mNetworkName.m8, aNetworkName, length);
aDataset.mComponents.mIsNetworkNamePresent = true;
otDatasetSetActive(aInstance, &aDataset);
/* Set the router selection jitter to override the 2 minute default.
CLI cmd > routerselectionjitter 20
Warning: For demo purposes only - not to be used in a real product */
uint8_t jitterValue = 20;
otThreadSetRouterSelectionJitter(aInstance, jitterValue);
}
As detailed in the function, the Thread network parameters we're using for this application are:
- Channel = 15
- PAN ID = 0x2222
- Extended PAN ID = C0DE1AB5C0DE1AB5
- Network Key = 1234C0DE1AB51234C0DE1AB51234C0DE
- Network Name = OTCodelab
In addition, this is where we decrease the Router Selection Jitter, so our devices change roles quicker for demo purposes. Note that this is only done if the node is an FTD (Full Thread Device). More about that in the next step.
9. API: Restricted functions
Some of OpenThread's APIs modify settings that should only be modified for demo or testing purposes. These APIs should not be used in a production deployment of an application using OpenThread.
For example, the otThreadSetRouterSelectionJitter function adjusts the time (in seconds) that it takes for an End Device to promote itself to a Router. The default for this value is 120, per the Thread Specification. For ease of use in this Codelab, we're going to change it to 20, so you don't have to wait very long for a Thread node to change roles.
Note: MTD devices do not become routers, and support for a function like otThreadSetRouterSelectionJitter is not included in an MTD build. Later we need to specify CMake option -DOT_MTD=OFF, otherwise we will encounter a build failure.
You can confirm this by looking at the otThreadSetRouterSelectionJitter function definition, which is contained within a preprocessor directive of OPENTHREAD_FTD:
./openthread/src/core/api/thread_ftd_api.cpp
#if OPENTHREAD_FTD
#include <openthread/thread_ftd.h>
...
void otThreadSetRouterSelectionJitter(otInstance *aInstance, uint8_t aRouterJitter)
{
Instance &instance = *static_cast<Instance *>(aInstance);
instance.GetThreadNetif().GetMle().SetRouterSelectionJitter(aRouterJitter);
}
...
#endif // OPENTHREAD_FTD
10. CMake updates
Before you build your application, there are a few minor updates needed for three CMake files. These are used by the build system to compile and link your application.
./third_party/NordicSemiconductor/CMakeLists.txt
Now add some flags to the NordicSemiconductor CMakeLists.txt, to ensure GPIO functions are defined in the application.
ACTION: Add flags to the CMakeLists.txt file.
Open ./third_party/NordicSemiconductor/CMakeLists.txt in your preferred text editor, and add the following lines in COMMON_FLAG section.
...
set(COMMON_FLAG
-DSPIS_ENABLED=1
-DSPIS0_ENABLED=1
-DNRFX_SPIS_ENABLED=1
-DNRFX_SPIS0_ENABLED=1
...
# Defined in ./third_party/NordicSemiconductor/nrfx/templates/nRF52840/nrfx_config.h
-DGPIOTE_ENABLED=1
-DGPIOTE_CONFIG_IRQ_PRIORITY=7
-DGPIOTE_CONFIG_NUM_OF_LOW_POWER_EVENTS=1
)
...
./src/CMakeLists.txt
Edit the ./src/CMakeLists.txt file to add the new gpio.c source file:
ACTION: Add the gpio source to the ./src/CMakeLists.txt file.
Open ./src/CMakeLists.txt in your preferred text editor, and add the file to the NRF_COMM_SOURCES section.
... set(NRF_COMM_SOURCES ... src/gpio.c ... ) ...
./third_party/NordicSemiconductor/CMakeLists.txt
Lastly, add the nrfx_gpiote.c driver file to the NordicSemiconductor CMakeLists.txt file, so it's included with the library build of the Nordic drivers.
ACTION: Add the gpio driver to the NordicSemiconductor CMakeLists.txt file.
Open ./third_party/NordicSemiconductor/CMakeLists.txt in your preferred text editor, and add the file to the COMMON_SOURCES section.
... set(COMMON_SOURCES ... nrfx/drivers/src/nrfx_gpiote.c ... ) ...
11. Set up the devices
With all the code updates done, you're ready to build and flash the application to all three Nordic nRF52840 dev boards. Each device will function as a Full Thread Device (FTD).
Build OpenThread
Build the OpenThread FTD binaries for nRF52840 platform.
$ cd ~/ot-nrf528xx $ ./script/build nrf52840 UART_trans -DOT_MTD=OFF -DOT_APP_RCP=OFF -DOT_RCP=OFF
Navigate to the directory with the OpenThread FTD CLI binary, and convert it to hex format with the ARM Embedded Toolchain:
$ cd build/bin $ arm-none-eabi-objcopy -O ihex ot-cli-ftd ot-cli-ftd.hex
Flash the boards
Flash the ot-cli-ftd.hex file to each nRF52840 board.
Attach the USB cable to the Micro-USB debug port next to the external power pin on the nRF52840 board, and then plug it into your Linux machine. Set the correctly, LED5 is on.

As before, note the serial number of the nRF52840 board:

Navigate to the location of the nRFx Command Line Tools, and flash the OpenThread CLI FTD hex file onto the nRF52840 board, using the board's serial number:
$ cd ~/nrfjprog
$ ./nrfjprog -f nrf52 -s 683704924 --verify --chiperase --program \
~/openthread/output/nrf52840/bin/ot-cli-ftd.hex --reset
LED5 will briefly turn off during flashing. The following output is generated upon success:
Parsing hex file. Erasing user available code and UICR flash areas. Applying system reset. Checking that the area to write is not protected. Programing device. Applying system reset. Run.
Repeat this "Flash the boards" step for the other two boards. Each board should be connected to the Linux machine the same way, and the command to flash is the same, except for the board's serial number. Make sure to use each board's unique serial number in the
nrfjprog flashing command.
If successful, either LED1, LED2, or LED3 will be lit on each board. You might even see the lit LED switch from 3 to 2 (or 2 to 1) soon after flashing (the device role change feature).
12. Application functionality
All three nRF52840 boards should now be powered and running our OpenThread application. As detailed earlier, this application has two primary features.
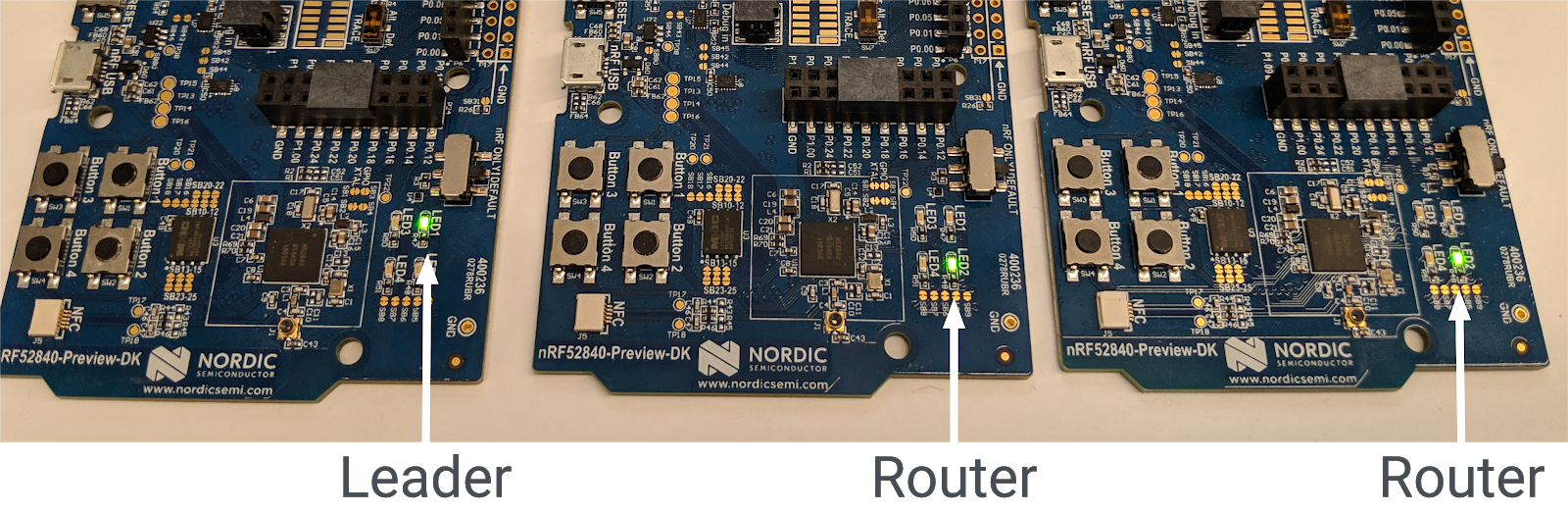
Device role indicators
The lit LED on each board reflects the current role of the Thread node:
- LED1 = Leader
- LED2 = Router
- LED3 = End Device
As the role changes, so does the lit LED. You should have already seen these changes on a board or two within 20 seconds of each device powering up.
UDP Multicast
When Button1 is pressed on a board, a UDP message is sent to the mesh-local multicast address, which includes all other nodes in the Thread network. In response to receiving this message, LED4 on all the other boards toggles on or off. LED4 remains on or off for each board until it receives another UDP message.


13. Demo: Observe device role changes
The devices you've flashed are a specific kind of Full Thread Device (FTD) called a Router Eligible End Device (REED). This means they can function as either a Router or End Device, and can promote themselves from an End Device to a Router.
Thread can support up to 32 Routers, but tries to keep the number of Routers between 16 and 23. If a REED attaches as an End Device and the number of Routers is below 16, it automatically promotes itself to a Router. This change should occur at a random time within the number of seconds that you set the otThreadSetRouterSelectionJitter value to in the application (20 seconds).
Every Thread network also has a Leader, which is a Router that is responsible for managing the set of Routers in a Thread network. With all the devices on, after 20 seconds one of them should be a Leader (LED1 on) and the other two should be Routers (LED2 on).
Remove the Leader
If the Leader is removed from the Thread network, a different Router promotes itself to a Leader, to ensure the network still has a Leader.
Turn off the Leader board (the one with LED1 lit) using the Power switch. Wait about 20 seconds. On one of the remaining two boards, LED2 (Router) will turn off and LED1 (Leader) will turn on. This device is now the Leader of the Thread network.

Turn the original Leader board back on. It should automatically rejoin the Thread network as an End Device (LED3 is lit). Within 20 seconds (the Router Selection Jitter) it promotes itself to a Router (LED2 is lit).

Reset the boards
Turn off all three boards, then turn them back on again and observe the LEDs. The first board that was powered up should start in the Leader role (LED1 is lit)—the first Router in a Thread network automatically becomes the Leader.
The other two boards initially connect to the network as End Devices (LED3 is lit) but should promote themselves to Routers (LED2 is lit) within 20 seconds.
Network partitions
If your boards aren't receiving sufficient power, or the radio connection between them is weak, the Thread network may split into partitions and you might have more than one device showing as Leader.
Thread is self-healing, so partitions should eventually merge back into a single partition with one Leader.
14. Demo: Send UDP multicast
If continuing from the previous exercise, LED4 should not be lit on any device.
Pick any board and press Button1. LED4 on all other boards in the Thread network running the application should toggle their state. If continuing from the previous exercise, they should now be on.

Press Button1 for the same board again. LED4 on all other boards should toggle again.
Press Button1 on a different board and observe how LED4 toggles on the other boards. Press Button1 on one of the boards where LED4 is currently on. LED4 remains on for that board but toggles on the others.

Network partitions
If your boards have partitioned and there is more than one Leader among them, the result of the multicast message will differ between boards. If you press Button1 on a board that has partitioned (and thus is the only member of the partitioned Thread network), LED4 on the other boards will not light up in response. If this happens, reset the boards—ideally they will reform a single Thread network and UDP messaging should work correctly.
15. Congratulations!
You've created an application that use OpenThread APIs!
You now know:
- How to program the buttons and LEDs on Nordic nRF52840 dev boards
- How to use common OpenThread APIs and the
otInstanceclass - How to monitor and react to OpenThread state changes
- How to send UDP messages to all devices in a Thread network
- How to modify Makefiles
Next steps
Building off of this Codelab, try the following exercises:
- Modify the GPIO module to use GPIO pins instead of the onboard LEDs, and connect external RGB LEDs that change color based on Router role
- Add GPIO support for a different example platform
- Instead of using multicast to ping all devices from a button press, use the Router/Leader API to locate and ping an individual device
- Connect your mesh network to the internet by using an OpenThread Border Router and multicast them from outside the Thread network to light the LEDs
Further reading
Check out openthread.io and GitHub for a variety of OpenThread resources, including:
- Supported Platforms — discover all the platforms that support OpenThread
- Build OpenThread — further details on building and configuring OpenThread
- Thread Primer — a great reference on Thread concepts
Reference: